

前言
在最近的科研生活中,我时常遇上很有意思的小问题,在此我开一个专栏专门记录下我已经解决的和未曾解决的小灵感。
问题说明
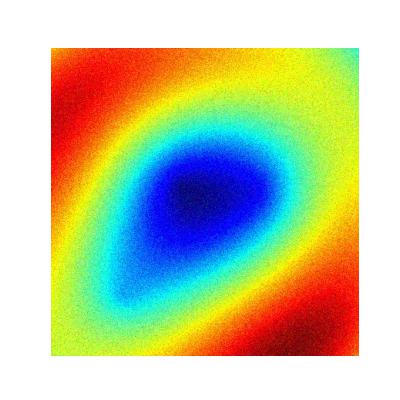
小灵感:在一块平面上,有$n$个振动源在产生振动,根据物理定律这些振动点会在平面上产生振动分布(激励分布),我将振幅数据采集,绘制出类似于图1中的分布图。此时,我想将振动分布图作为输入数据,振动点源的位置坐标作为输出数据,尤其需要注意的是,我不在模型中设置最后输出的点源的数量,也就是说模型最后输出的坐标的数量不是一成不变的。
我认为有意思的地方是——模型在一方面在做类似对点源数量的回归任务,输出预测的点源数量,一方面在分类的基础上进行回归任务,输出激励点源的位置坐标。
灵感假设
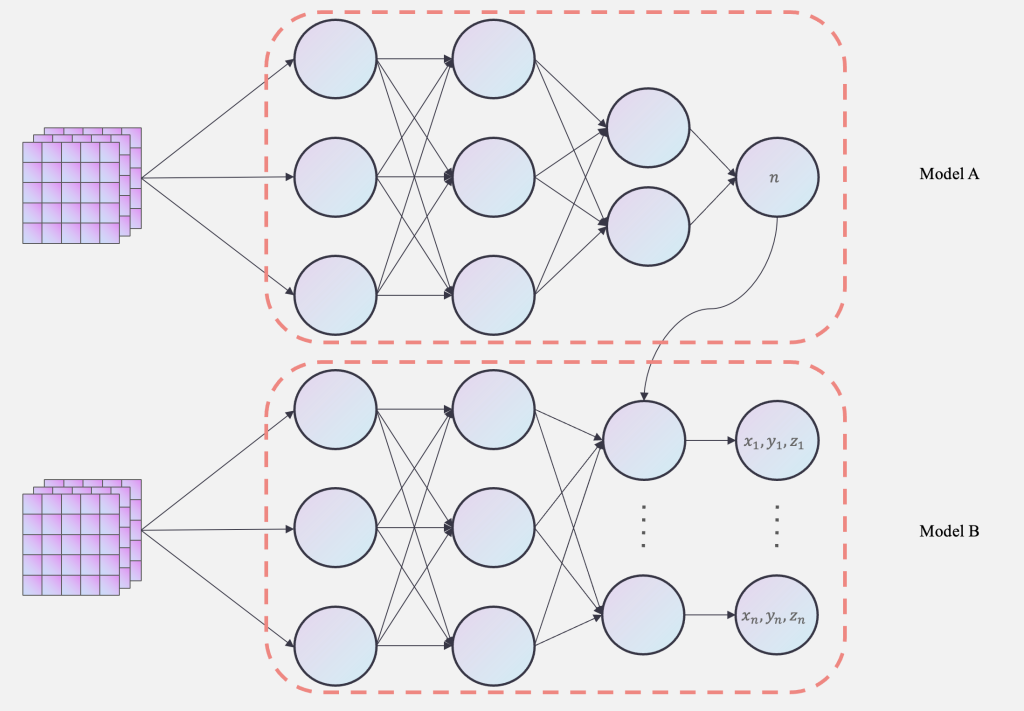
要在一个模型中做到这些是较为困难的,因此,我设想是否能组合两个模型构建为一个网络进行训练呢?假设$Model A$作为实现输出点源数量的部分,那么在$Model B$的输出层中,最后的输出层(线性层)的维度则由$Model A$(输出的点源数量)控制。这样就简单构建出了一个组合模型网络架构。
PS:经过后续的查阅资料,原来本文的这种组合模型网络架构已经有较多的相关工作了,常在多任务学习中运用,被称为级联神经网络。
如图2所示,能够更加清晰的看清楚模型的运作机制。
灵感小验证
下面是代码部分,我先采用了简单的线性层进行实验,测试我的小灵感是否能够实现。
import torch
import torch.nn as nn
import torch.nn.functional as F
class MLP4Number(nn.Module):
def __init__(self, channel=3, hidden_dim=64, output_dim=1):
super().__init__()
self.fc1 = nn.Linear(channel, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, output_dim)
def forward(self, x):
x = F.relu(self.fc1(x))
x = self.fc2(x)
x = torch.round(x).clamp(min=1)
return x
class MLP4Coordinate(nn.Module):
def __init__(self, channel=10, hidden_dim=64, output_dim=1):
super().__init__()
self.fc1 = nn.Linear(channel, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, output_dim)
self.number = output_dim
def forward(self, x):
x = F.relu(self.fc1(x))
x = self.fc2(x)
x = x.view(self.number, 3)
return x
class MLP4TwoTask(nn.Module):
def __init__(self, input_channels=256, hidden_dim=64, output_dim=1):
super().__init__()
self.input = input_channels ** 2
self.hidden = hidden_dim
self.number = MLP4Number(self.input, hidden_dim, output_dim)
def forward(self, x):
c = torch.tensor([])
x = x.view(x.size(0), -1)
n = self.number(x)
for i in n:
self.coordinate = MLP4Coordinate(self.input, self.hidden, output_dim=int(i))
a = self.coordinate(x)
c = torch.cat((c, a), dim=0)
return n, c
if __name__ == '__main__':
model = MLP4TwoTask()
imgs = torch.randn(3, 256, 256)
output = model(imgs)
print(output)下面是经过ChatGPT润色后的代码实现。
import torch
import torch.nn as nn
import torch.nn.functional as F
class MLP4Number(nn.Module):
def __init__(self, in_dim: int, hidden_dim: int = 64, output_dim: int = 1):
super().__init__()
self.fc1 = nn.Linear(in_dim, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, output_dim)
def forward(self, x: torch.Tensor) -> torch.Tensor:
"""
输入:
x: Tensor,shape = (batch_size, in_dim)
输出:
Tensor,shape = (batch_size, 1),经过 round 并 clamp(min=1)
"""
x = F.relu(self.fc1(x))
x = self.fc2(x)
x = torch.round(x).clamp(min=1)
return x.squeeze(-1) # 返回 shape = (batch_size,)
class MLP4Coordinate(nn.Module):
def __init__(self, in_dim: int, hidden_dim: int = 64, output_dim: int = 1):
super().__init__()
self.fc1 = nn.Linear(in_dim, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, output_dim * 3)
# output_dim 表示“要预测几个三维点”,最终输出会 reshape 成 (output_dim, 3)
def forward(self, x: torch.Tensor, num_points: int) -> torch.Tensor:
"""
输入:
x: Tensor,shape = (1, in_dim) 或 (batch=1, in_dim) —— 单个样本
num_points: int,表示要预测多少个 (x,y,z) 坐标点
输出:
Tensor,shape = (num_points, 3)
"""
x = F.relu(self.fc1(x))
x = self.fc2(x) # shape = (1, num_points*3)
x = x.view(num_points, 3) # reshape 成 (num_points, 3)
return x
class MLP4TwoTask(nn.Module):
def __init__(self, input_size: int = 256, hidden_dim: int = 64):
"""
input_size: 图像边长(如 256),网络的输入是 (batch, input_size, input_size)
hidden_dim: MLP 隐藏层维度
"""
super().__init__()
self.input_dim = input_size * input_size # 256*256
self.hidden_dim = hidden_dim
# 阶段一:预测要输出多少个点
self.number_net = MLP4Number(in_dim=self.input_dim,
hidden_dim=hidden_dim,
output_dim=1) # 单个数值
# 注意:这里并不预先创建 MLP4Coordinate,因为 output_dim(坐标点数)是动态的。
# 我们会在 forward 里按需实例化一个局部的 MLP4Coordinate
def forward(self, x: torch.Tensor) -> (torch.Tensor, torch.Tensor):
"""
输入:
x: Tensor,shape = (batch_size, input_size, input_size)
输出:
num_list: Tensor,shape = (batch_size,) —— 每个样本预测的点的数量 (>=1)
coords_all: Tensor,shape = (sum(num_list), 3) —— 把所有样本的坐标拼在一起
"""
batch_size = x.size(0)
device = x.device
# 先把 (batch, H, W) -> (batch, H*W)
x_flat = x.view(batch_size, -1) # shape = (batch_size, input_dim)
# 阶段一:预测每个样本要多少个点 (>=1)
num_list = self.number_net(x_flat) # shape = (batch_size,)
# num_list 内的值是浮点取整后保证 ≥1,比如 [3., 1., 5., ...]
coords_list = []
for idx in range(batch_size):
num_i = int(num_list[idx].item()) # 取出第 idx 个样本需要的点数 (Python int)
# 注意:这里用临时变量,不要写成 self.coord_net,否则会被注册到 Module 里
coord_net = MLP4Coordinate(in_dim=self.input_dim,
hidden_dim=self.hidden_dim,
output_dim=num_i).to(device)
# 取出第 idx 个样本的扁平化向量,形状要是 (1, input_dim),方便 MLP4Coordinate 接受
single_x = x_flat[idx].unsqueeze(0) # shape = (1, input_dim)
# 得到坐标:shape = (num_i, 3)
coords_i = coord_net(single_x, num_points=num_i)
coords_list.append(coords_i)
# 把所有样本预测出来的坐标一起 cat,最终形状 = (sum(num_list), 3)
coords_all = torch.cat(coords_list, dim=0)
return num_list, coords_all
if __name__ == "__main__":
# 示例运行
model = MLP4TwoTask(input_size=256, hidden_dim=64) # 如果有 GPU,就 .cuda()
imgs = torch.randn(3, 256, 256)
num_out, coords_out = model(imgs)
print("Num per sample:", num_out) # e.g. tensor([2., 5., 1.], device='cuda:0')
print("All coords shape:", coords_out.shape) # (2+5+1, 3) = (8,3) 这种形式验证实验
接下来我们将级联MLP改变为级联CNN,下面开始实验。
构建数据集
在本文中的所有数据都是采用了数值模拟的办法,下面是我们简要构建数据集的代码。
import numpy as np
import matplotlib.pyplot as plt
import os
import random
from matplotlib import cm # 导入颜色映射模块
# 创建输出目录
output_dir = "data"
if not os.path.exists(output_dir):
os.makedirs(output_dir)
# 波的参数
k = 0.2 # 波的频率
speed = 0.2 # 波的传播速度
nums = 100 # 生成数据数量
resolution = 400 # 图像分辨率
# 网格点
x = np.linspace(-10, 10, resolution)
y = np.linspace(-10, 10, resolution)
X, Y = np.meshgrid(x, y)
# 随机生成激励点位置
def generate_random_sources(num_sources):
sources = []
for _ in range(num_sources):
x_pos = random.uniform(0, 1) # 随机 x 坐标
y_pos = random.uniform(0, 1) # 随机 y 坐标
sources.append(np.array([x_pos, y_pos]))
return sources
# 生成波的幅度
def generate_wave(sources, frame):
Z = np.zeros_like(X) # 初始化波的幅度
for center in sources:
R = np.sqrt((X - center[0]) ** 2 + (Y - center[1]) ** 2)
Z += np.sin(k * R - speed * frame) # 叠加每个激励点的波
return Z
# 生成并保存数据(添加高斯噪声)
def generate_and_save_data(num_sources, output_dir="route_data"):
# 创建子目录
npy_dir = os.path.join(output_dir, "npy")
pic_dir = os.path.join(output_dir, "pic")
os.makedirs(npy_dir, exist_ok=True)
os.makedirs(pic_dir, exist_ok=True)
for frame in range(nums):
# 随机生成激励点位置
sources = generate_random_sources(num_sources)
# 生成波的幅度
Z = generate_wave(sources, frame)
# 将波形数据映射为 RGB 图像数据
norm_z = (Z - Z.min()) / (Z.max() - Z.min())
rgba_data = cm.jet(norm_z)
rgb_data = rgba_data[..., :3]
# 添加高斯噪声
noise_std = 0.1 # 噪声强度,根据需要调整
noise = np.random.normal(0, noise_std, rgb_data.shape)
noisy_rgb = np.clip(rgb_data + noise, 0, 1) # 限制在有效范围
# 保存带噪声的npy文件
npy_filename = os.path.join(npy_dir, f"{num_sources}_frame_{frame:03d}.npy")
np.save(npy_filename, noisy_rgb)
# 可视化并保存图片
img_filename = os.path.join(pic_dir, f"{num_sources}_frame_{frame:03d}.png")
plt.imshow(noisy_rgb)
# 标记激励点
for source in sources:
x_idx = np.argmin(np.abs(x - source[0]))
y_idx = np.argmin(np.abs(y - source[1]))
plt.scatter(x[x_idx], y[y_idx], color='white', s=100, marker='x', alpha=0.6) # 调整透明度
plt.axis('off')
plt.savefig(img_filename, bbox_inches='tight', pad_inches=0)
plt.clf()
print(f"Generated route_data for {num_sources} sources with Gaussian noise.")
print(f"Saved route_data to {output_dir}")
# 生成带噪声的数据
generate_and_save_data(1)
generate_and_save_data(2)
generate_and_save_data(3)在上述的代码中,我们设置波的频率为$k=0.2$,传播速度为0.2,每组数量为100,高斯噪声为0.1,每组的图像分辨率为$400 \times 400$,随机点的x和y的坐标范围均在$[0,1]$。其中,由于神经网络的本质其实就是一种函数映射$f(\cdot)$,所以我们可以随意构建具体坐标(因为只是要验证idea的可行性,无需太过严谨),通过构建在x和y的坐标范围内的坐标数据并将其作为文件名对Data进行重命名,得到最后的数据集。
PS(微操):无论坐标数据的范围,其实都可以将其归一化后输入网络中进行学习,前提是需要提取纪录下数据中的最大值与最小值用来还原回原坐标。
我们在训练过程中构建出Data内容为(Images,Coords)的数据集,其中Images为(batch,3,H,W),Coords为(batch,coords),Images Size为$400 \times 400$。
下面是构建数据集部分的代码:
class NpyDataset(Dataset):
def __init__(self, data_dir: str):
super().__init__()
self.file_paths = glob.glob(os.path.join(data_dir, "*.npy"))
self.file_paths.sort()
def __len__(self):
return len(self.file_paths)
def __getitem__(self, idx: int):
file_path = self.file_paths[idx]
filename = os.path.basename(file_path)
# 加载 .npy 文件内容
np_array = np.load(file_path) # e.g. shape = (400, 400, 3)
# 如果是三通道(H, W, 3),转成 (3, H, W)
if np_array.ndim == 3:
# 假设最后一维是 channel
data_tensor = torch.from_numpy(np_array).permute(2, 0, 1).float()
elif np_array.ndim == 2:
# 如果是单通道(H, W),加一个通道维 (1, H, W)
data_tensor = torch.from_numpy(np_array).unsqueeze(0).float()
else:
# 如果数据有其他维度,就根据实际情况处理
raise ValueError(f"Unsupported npy shape: {np_array.shape}")
# 从文件名解析坐标(不变)
name_without_ext = os.path.splitext(filename)[0]
parts = name_without_ext.split("_")
coords = []
for i in range(0, len(parts), 2):
x = float(parts[i]);
y = float(parts[i + 1])
coords.append([x, y])
coord_tensor = torch.tensor(coords, dtype=torch.float32)
return data_tensor, coord_tensor
def variable_collate_fn(batch):
"""
自定义 collate_fn,用于处理每个样本 label (coord) 长度不同的情况。
batch 是 list of (data_tensor, coord_tensor)。
返回:
data_batch: Tensor, 将 data_tensor 堆叠,形状 = (batch_size, ...)
coords_list: List of Tensors, 每个 coord_tensor 形状 = (Ni, 2)
"""
data_list, coords_list = zip(*batch)
data_batch = torch.stack(data_list, dim=0)
return data_batch, list(coords_list)构建级联CNN
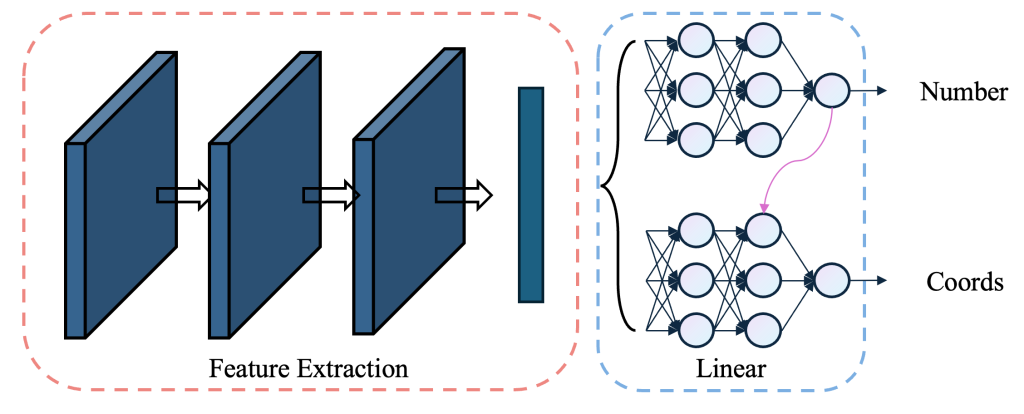
如图3所示,我们先采用卷积操作提取图片的特征信息,然后将特征信息输入线性层进行进一步的学习和变化,最后输出我们想要得到的数据。其中,在Feature Extraction中,为了使得网络层数能够更多,我们采用了由残差连接构成的残差块,经过堆叠构成总体的卷积提取部分。
PS:由于图3中模型的表达能力有限,下方的代码仅仅只表示模型搭建的基本思路,在复现过程中请根据自己的需求对模型进行模块的添加,本文中的所有代码均放置于Github中,有需要浮现者可以前往我的Github上查看完整的代码。(https://github.com/MAOJIUTT/Cascade-Neural-Networks)
下面是模型的代码
class ResBlock(nn.Module):
def __init__(self, channels: int):
super().__init__()
self.conv1 = nn.Conv2d(channels, channels, kernel_size=3, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(channels)
self.conv2 = nn.Conv2d(channels, channels, kernel_size=3, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(channels)
def forward(self, x: torch.Tensor) -> torch.Tensor:
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = F.relu(out, inplace=True)
out = self.conv2(out)
out = self.bn2(out)
out += identity
out = F.relu(out, inplace=True)
return out
class CNN4TwoStage(nn.Module):
def __init__(
self,
in_channels: int = 1,
base_channels: int = 32,
num_resblocks: int = 2,
max_points: int = 10,
hidden_dim: int = 128
):
super().__init__()
self.in_channels = in_channels
self.base_channels = base_channels
self.max_points = max_points
self.hidden_dim = hidden_dim
# backbone
self.conv_start = nn.Sequential(
nn.Conv2d(in_channels, base_channels, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(base_channels),
nn.ReLU(inplace=True)
)
res_blocks = []
for _ in range(num_resblocks):
res_blocks.append(ResBlock(base_channels))
self.residual_layers = nn.Sequential(*res_blocks)
self.global_pool = nn.AdaptiveAvgPool2d((1,1))
self.fc_feature = nn.Linear(base_channels, hidden_dim)
# Number Head
self.number_fc = nn.Linear(hidden_dim, 1)
# Coordinate Head (改为 max_points * 2)
self.coord_fc = nn.Linear(hidden_dim, max_points * 2)
def forward(self, x: torch.Tensor) -> (torch.Tensor, torch.Tensor):
"""
输入:
x: (batch, in_channels, H, W)
输出:
num_list: (batch,) 整数型,预测的每张图要输出几个点
coords_all: (sum_i Ni, 2) 所有样本拼接后的 (x,y) 坐标
"""
batch_size = x.size(0)
device = x.device
# backbone 提取特征
out = self.conv_start(x) # (batch, base, H, W)
out = self.residual_layers(out) # (batch, base, H, W)
out = self.global_pool(out) # (batch, base, 1, 1)
out = out.view(batch_size, -1) # (batch, base)
feat = F.relu(self.fc_feature(out))# (batch, hidden_dim)
# Number Head
num_pred = self.number_fc(feat) # (batch,1)
num_pred = torch.round(num_pred).clamp(min=1) # 保证 ≥1
num_list = num_pred.squeeze(-1).long() # (batch,)
# Coordinate Head → (batch, max_points*2)
coord_pred = self.coord_fc(feat) # (batch, max_points*2)
coords_list = []
for i in range(batch_size):
n_i = int(num_list[i].item())
if n_i > self.max_points:
n_i = self.max_points
# 取前 n_i*2 个数,reshape 为 (n_i,2)
coords_i = coord_pred[i, : n_i * 2].view(n_i, 2)
coords_list.append(coords_i)
# 把所有样本的 coords_i 在第 0 维拼起来 -> (sum_i n_i, 2)
coords_all = torch.cat(coords_list, dim=0)
return num_list, coords_all阶段性训练(冻结-微调策略)
由于级联CNN是多任务结构,是一个典型的多任务学习模型(Multi-Task Learning,MTL),拥有两个部分——主干网络(Backbone)和任务分支(Head)。主干网络用于提取共享特征,任务分支则是完成对应需要完成的任务。其中,在本文的多任务结构中有两个关联的学习阶段,阶段1 为 Number Head 预测的是每张图中目标的个数;阶段2 为 Coordinate Head 预测的是目标的坐标,而它依赖于阶段1 Number Head的预测结果。因此,可以认为如果 Number Head 预测不准,那么 Coordinate Head 的训练会受影响(如点数不对导致配对错误)。所以,我们可以采用如下两段式训练策略。
第一阶段:冻结 Coordinate Head ,只优化数量预测,代码如下。
def train_number_head(model, loader, optimizer, epochs=10):
model.train()
# 冻结坐标预测头
for param in model.coord_fc.parameters():
param.requires_grad = False
mse_num = nn.MSELoss()
for epoch in range(epochs):
epoch_loss = 0.0
for x_batch, coords_list in loader:
x_batch = x_batch.to(device)
num_target = torch.tensor(
[coords.shape[0] for coords in coords_list],
dtype=torch.float32, device=device
)
num_pred, _ = model(x_batch)
loss = mse_num(num_pred.float(), num_target)
optimizer.zero_grad()
loss.backward()
optimizer.step()
epoch_loss += loss.item()
print(f"[Number Head] Epoch [{epoch+1}/{epochs}] Loss: {epoch_loss:.6f}")第二阶段:解冻 Coordinate Head ,可选冻 Number Head ,代码如下。
def train_coord_head(model, loader, optimizer, epochs=10, lambda_coord=1.0, freeze_number_head=False):
model.train()
# 解冻坐标头
for param in model.coord_fc.parameters():
param.requires_grad = True
# 可选:冻结数量预测头
if freeze_number_head:
for param in model.number_fc.parameters():
param.requires_grad = False
mse_num = nn.MSELoss()
mse_coord = nn.MSELoss()
for epoch in range(epochs):
total_loss_num, total_loss_coord = 0.0, 0.0
for x_batch, coords_list in loader:
x_batch = x_batch.to(device)
num_target = torch.tensor(
[coords.shape[0] for coords in coords_list],
dtype=torch.float32, device=device
)
coords_target_all = torch.cat(
[coords.to(device) for coords in coords_list], dim=0
)
num_pred, coords_pred_all = model(x_batch)
loss_num = mse_num(num_pred.float(), num_target)
loss_coord = mse_coord(coords_pred_all, coords_target_all)
total_loss = loss_num + lambda_coord * loss_coord
optimizer.zero_grad()
total_loss.backward()
optimizer.step()
total_loss_num += loss_num.item()
total_loss_coord += loss_coord.item()
print(f"[Coord Head] Epoch [{epoch+1}/{epochs}] NumLoss: {total_loss_num:.6f} CoordLoss: {total_loss_coord:.6f}")但是在训练过程中计算Loss值时,仍然会遇上点数不对导致配对错误的问题,本篇Blog目前未能解决该问题,所以在本文中我所采用的解决方法是分段式训练模型,先将模型中预测激励点数量的模块部分训练到90%以上的准确率,然后再在这个基础上训练预测坐标部分的模型,这样就能够保证一定的模型预测准确率。
PS:本Blog中未解决的问题部分我会在暑期中尝试解决。
损失函数
在训练过程中,损失函数是尤为重要的,但是在这个网络架构中,模型的输出维度是动态的,在维度上无法很好的与数据的标签维度对应,因此无法直接对其进行求损失。结合本文的训练思路,我采用逐数量一一对应求Loss损失值。
具体意思就是,当模型输出维度与数据标签的维度不匹配时,我只需要根据较小那一部分的输出维度作为计算Loss损失值时的维度。因为模型的输出维度与数据标签维度不同时会存在两种情况,一是模型的输出维度小于数据标签维度(预测点的数量小于目标数量),二是模型的输出维度大于数据标签维度(预测点的数量大于目标数量)。所以为了保持维度上的统一以方便计算Loss损失值,我决定根据较小那一部分的输出维度作为计算Loss损失值时的维度。
所以我们将第二阶段的代码修改如下:
def train_coord_head(model, loader, optimizer, epochs=10, lambda_coord=1.0, freeze_number_head=False, coord_eps=0.5):
model.train()
for param in model.coord_fc.parameters():
param.requires_grad = True
if freeze_number_head:
for param in model.number_fc.parameters():
param.requires_grad = False
mse_num = nn.MSELoss()
mse_coord = nn.MSELoss()
for epoch in range(epochs):
total_loss_num, total_loss_coord = 0.0, 0.0
correct_count_num = 0
total_count_num = 0
correct_count_coord = 0
total_count_coord = 0
for x_batch, coords_list in loader:
x_batch = x_batch.to(device)
num_target = torch.tensor(
[coords.shape[0] for coords in coords_list],
dtype=torch.float32, device=device
)
coords_target_all = torch.cat(
[coords.to(device) for coords in coords_list], dim=0
)
num_pred, coords_pred_all = model(x_batch)
# ===== 点数预测 =====
loss_num = mse_num(num_pred.float(), num_target)
pred_rounded = torch.round(num_pred).clamp(min=1, max=model.max_points)
correct_count_num += (pred_rounded == num_target).sum().item()
total_count_num += len(num_target)
# ===== 坐标预测 =====
pred_coords_split = []
target_coords_split = []
idx_pred = 0
idx_target = 0
for i in range(len(coords_list)):
coords_target_i = coords_list[i].to(device)
n_target = coords_target_i.shape[0]
n_pred = int(pred_rounded[i].item())
coords_pred_i = coords_pred_all[idx_pred: idx_pred + n_pred]
idx_pred += n_pred
idx_target += n_target
# 取最小长度
n_common = min(n_pred, n_target)
if n_common > 0:
coords_pred_i = coords_pred_i[:n_common]
coords_target_i = coords_target_i[:n_common]
pred_coords_split.append(coords_pred_i)
target_coords_split.append(coords_target_i)
# ==== 准确率统计 ====
dist = torch.norm(coords_pred_i - coords_target_i, dim=1)
correct_count_coord += (dist < coord_eps).sum().item()
total_count_coord += n_common
if pred_coords_split:
coords_pred_used = torch.cat(pred_coords_split, dim=0)
coords_target_used = torch.cat(target_coords_split, dim=0)
loss_coord = mse_coord(coords_pred_used, coords_target_used)
else:
loss_coord = torch.tensor(0.0, device=device)
total_loss = loss_num + lambda_coord * loss_coord
optimizer.zero_grad()
total_loss.backward()
optimizer.step()
total_loss_num += loss_num.item()
total_loss_coord += loss_coord.item()
acc_num = correct_count_num / total_count_num if total_count_num > 0 else 0.0
acc_coord = correct_count_coord / total_count_coord if total_count_coord > 0 else 0.0
print(f"[Coord Head] Epoch [{epoch+1}/{epochs}] NumLoss: {total_loss_num:.6f} CoordLoss: {total_loss_coord:.6f} "
f"NumAcc: {acc_num:.4f} CoordAcc(@{coord_eps}): {acc_coord:.4f}")可以看到,在改进后的代码中,我们在判断坐标预测的准确率的时候,设置了coord_eps参数为0.5,作为距离容差(距离容忍度的差值),用其作为距离容差计算得到的Coord Acc值则表示为预测点距离真实点的欧几里得距离小于0.5的预测点的比例。
模型的性能
由于在模型的训练过程中,采用图3的网络架构训练的效果不是很好,我们重新根据图3的基本思路在特征提取阶段添加了下采样的过程,以及在坐标预测分支中将线性层替换为残差MLP结构,具体代码如下:
class ResBlock(nn.Module):
def __init__(self, channels: int):
super().__init__()
self.conv1 = nn.Conv2d(channels, channels, kernel_size=3, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(channels)
self.conv2 = nn.Conv2d(channels, channels, kernel_size=3, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(channels)
def forward(self, x):
identity = x
out = F.relu(self.bn1(self.conv1(x)), inplace=True)
out = self.bn2(self.conv2(out))
return F.relu(out + identity, inplace=True)
class DownBlock(nn.Module):
def __init__(self, in_channels, out_channels, dropout_rate=0.0, use_resblock=True):
super().__init__()
self.down = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=4, stride=2, padding=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True),
)
self.res = ResBlock(out_channels) if use_resblock else nn.Identity()
self.dropout = nn.Dropout2d(dropout_rate) if dropout_rate > 0 else nn.Identity()
def forward(self, x):
x = self.down(x)
x = self.res(x)
x = self.dropout(x)
return x
class ResidualCoordHead(nn.Module):
def __init__(self, hidden_dim, max_points):
super().__init__()
self.max_points = max_points
self.fc1 = nn.Linear(hidden_dim, hidden_dim)
self.norm1 = nn.LayerNorm(hidden_dim)
self.dropout1 = nn.Dropout(0.2)
self.fc2 = nn.Linear(hidden_dim, hidden_dim // 2)
self.norm2 = nn.LayerNorm(hidden_dim // 2)
self.dropout2 = nn.Dropout(0.2)
self.output_layer = nn.Linear(hidden_dim // 2, max_points * 2)
self.shortcut = nn.Linear(hidden_dim, hidden_dim // 2)
def forward(self, x):
residual = self.shortcut(x)
x = F.relu(self.norm1(self.fc1(x)))
x = self.dropout1(x)
x = F.relu(self.norm2(self.fc2(x)))
x = self.dropout2(x)
return self.output_layer(x + residual)
class CNN4TwoStage(nn.Module):
def __init__(
self,
in_channels=1,
base_channels=32,
max_points=10,
hidden_dim=128,
num_down_blocks=6,
dropout_rate=0.3,
use_resblock=True,
):
super().__init__()
self.max_points = max_points
# 构建 DownBlock 列表
self.down_blocks = nn.ModuleList()
channels = [in_channels] + [base_channels * (2 ** i) for i in range(num_down_blocks)]
for i in range(num_down_blocks):
self.down_blocks.append(DownBlock(
in_channels=channels[i],
out_channels=channels[i + 1],
dropout_rate=dropout_rate,
use_resblock=use_resblock
))
self.global_pool = nn.AdaptiveAvgPool2d((1, 1))
final_channel = channels[-1]
self.fc_feature = nn.Sequential(
nn.Flatten(),
nn.Linear(final_channel, hidden_dim),
nn.ReLU(inplace=True),
nn.Dropout(dropout_rate),
)
self.number_fc = nn.Linear(hidden_dim, 1)
self.coord_fc = ResidualCoordHead(hidden_dim, max_points)
def forward(self, x):
batch_size = x.size(0)
device = x.device
for block in self.down_blocks:
x = block(x)
x = self.global_pool(x)
feat = self.fc_feature(x)
num_pred = self.number_fc(feat).squeeze(-1) # (B,)
coord_pred = self.coord_fc(feat) # (B, max_points * 2)
coords_list = []
for i in range(batch_size):
n_i = int(torch.round(num_pred[i]).clamp(1, self.max_points).item())
coords_i = coord_pred[i, :n_i * 2].view(n_i, 2)
coords_list.append(coords_i)
coords_all = torch.cat(coords_list, dim=0) if coords_list else torch.empty(0, 2, device=device)
return num_pred, coords_all我大概做了一些简单的对比实验来测量模型的基本性能,再进行训练前,为了实验的可复现性,我设置了随机种子进行初始化模型参数,代码如下,记住这个函数需要放在导库后以及所有函数前,并且需要在所有函数前调用。
def set_seed(seed: int = 42):
random.seed(seed)
np.random.seed(seed)
torch.manual_seed(seed)
torch.cuda.manual_seed(seed)
torch.cuda.manual_seed_all(seed) # if using multi-GPU
torch.backends.cudnn.deterministic = True
torch.backends.cudnn.benchmark = False
set_seed()特别注意本文中只探究Idea的可实现性,而不做严谨的探讨(比如说还需要在验证集上进行测试等)
效果验证
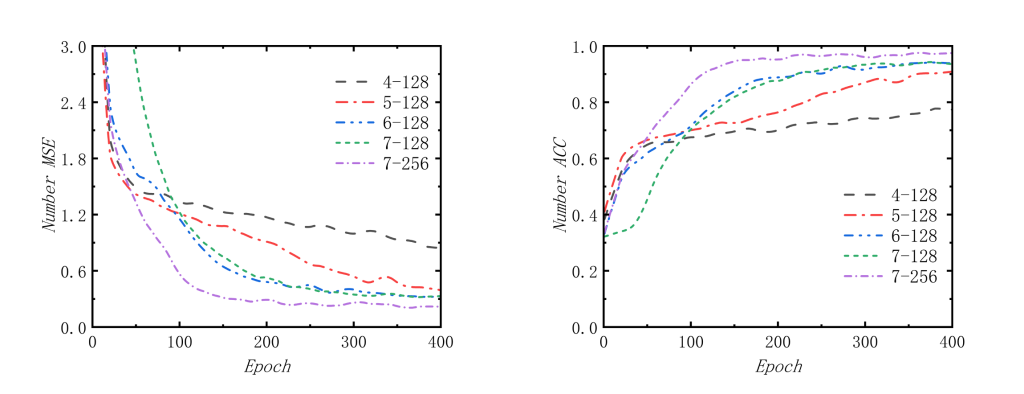
如图4,我们能够看到阶段1中的MSE损失曲线和预测准确率曲线,均能看到loss都在下降,我们先进行横向对比,也就是固定隐藏层为128,然后对比在不同Block数量下的收敛情况;再固定Block数量为7,然后再对比不同隐藏层数量下的收敛情况。根据MSE损失图像,得到结论——在相同隐藏层下增加Block的数量会加快收敛速度和收敛效果;在相同Block数量下增加隐藏层维度同样也会加快收敛速度和收敛效果。 当然,也可以看到准确率的曲线也符合MSE损失图像得到的结论。
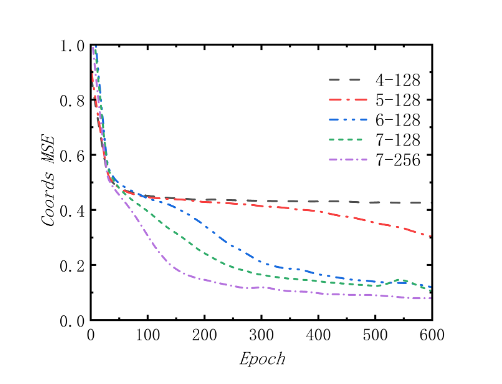
如图5,由阶段2中的MSE损失图像依旧可以得到阶段1中的结论,同样证明了“在相同隐藏层下增加Block的数量会加快收敛速度和收敛效果;在相同Block数量下增加隐藏层维度同样也会加快收敛速度和收敛效果”。
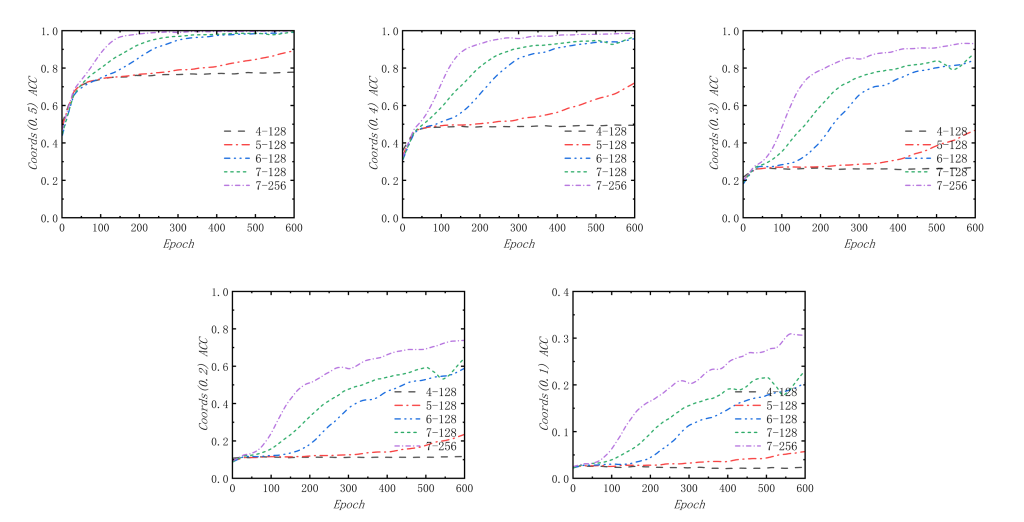
如图6,我还探究了在设置的不同距离容差下,阶段2的准确率情况。我发现模型预测的精度大概是在0.1~0.2左右,因为模型在距离容差为0.5,0.4,0.3的情况下都能够保持90%以上高准确率的效果,在距离容差为0.2时,模型的准确率下降明显,尽管同样有接近80%的准确率,但是当容差为0.1时,模型的准确率断崖式下降,虽然使用7-256(Block数量为7,隐藏层维度为256)的模型的准确率比其他模型准确率要高得多,但是准确率仍然很低(低于35%)。所以能够知道模型的坐标预测精度为0.1~0.2左右,总体上预测效果不错。
性能指标
接下来我会以数值的形式来研究模型的效果,但是具体数值表示的意义就不再赘述。
| Blocks | Hidden Dim | Num MSE | Coord MSE | Num Acc | Num Time | Coord Time | Param |
| 4 | 128 | 0.714229 | 0.418045 | 84.00% | 499 | 807 | 2.2M |
| 5 | 128 | 0.316047 | 0.296123 | 94.67% | 513 | 814 | 8.8M |
| 6 | 128 | 0.243847 | 0.113514 | 97.67% | 537 | 822 | 34.8M |
| 7 | 128 | 0.250646 | 0.103853 | 97.00% | 542 | 889 | 138.9M |
| 7 | 256 | 0.159434 | 0.070690 | 99.33% | 579 | 904 | 139.3M |
模型7-256在各方面均远优于模型4-128,其中Num MSE下降了约78.87%,Coord MSE下降了约83.25%,Num Acc提高了约15.33%,但是时间开销成本分别只增加了16%和12%。
| Blocks | Hidden Dim | Coord(0.5) | Coord(0.4) | Coord(0.3) | Coord(0.2) | Coord(0.1) |
| 4 | 128 | 81.65% | 53.01% | 29.52% | 14.09% | 4.24% |
| 5 | 128 | 90.39% | 73.82% | 49.58% | 25.25% | 7.59% |
| 6 | 128 | 99.83% | 96.95% | 86.80% | 62.75% | 23.74% |
| 7 | 128 | 100% | 97.97% | 88.18% | 66.78% | 25.50% |
| 7 | 256 | 100% | 99.66% | 95.81% | 77.76% | 36.29% |
如上表示,在确定精度的时,模型7-256依旧要在各方面远优于模型4-128,当距离容差分别为0.5,0.4,0.3,0.2,0.1时,预测的准确率(精准度)分别提高了18%,46%,66%,63%,32%。
小结
总体上来看,本文的级联神经网络的Idea是可行的,但是在具体的实验过程中还是会有一些不严谨的地方存在,例如生成数据集的时候采用的随机坐标设置,这个也算上另外一种数据污染吧,还有在实验中没有设置验证集和测试集,当然还有很多其他的问题,在此就不再赘述,最后再次强调本文只是用于验证Idea的可实现性,并非是一篇严谨的论文或者技术分享帖,感谢理解。
Comments NOTHING